

研究方向:自主无人系统与集群协作技术
面向"十五五"时期低空经济发展需求,开展自主无人系统感知、认知、决策、控制与协同验证研究,形成无人机/无人车协同、数字孪生仿真与场景应用一体化研究体系。


本方向依托河南省车联网协同技术国际联合实验室,聚焦智慧立体交通体系架构,围绕无人车、无人机及其群体智能控制与数字孪生仿真等关键技术开展系统研究。研究内容涵盖自主无人系统理论基础、OODA 闭环智能决策、室内验证、室外实验、数字孪生与典型场景应用,致力于构建可感知、可认知、可决策、可控制、可验证的自主无人系统协同创新体系。
感知 — 认知 — 决策 — 控制 — 协同验证,构建自主运行闭环
六大模块支撑自主无人系统全链路协同
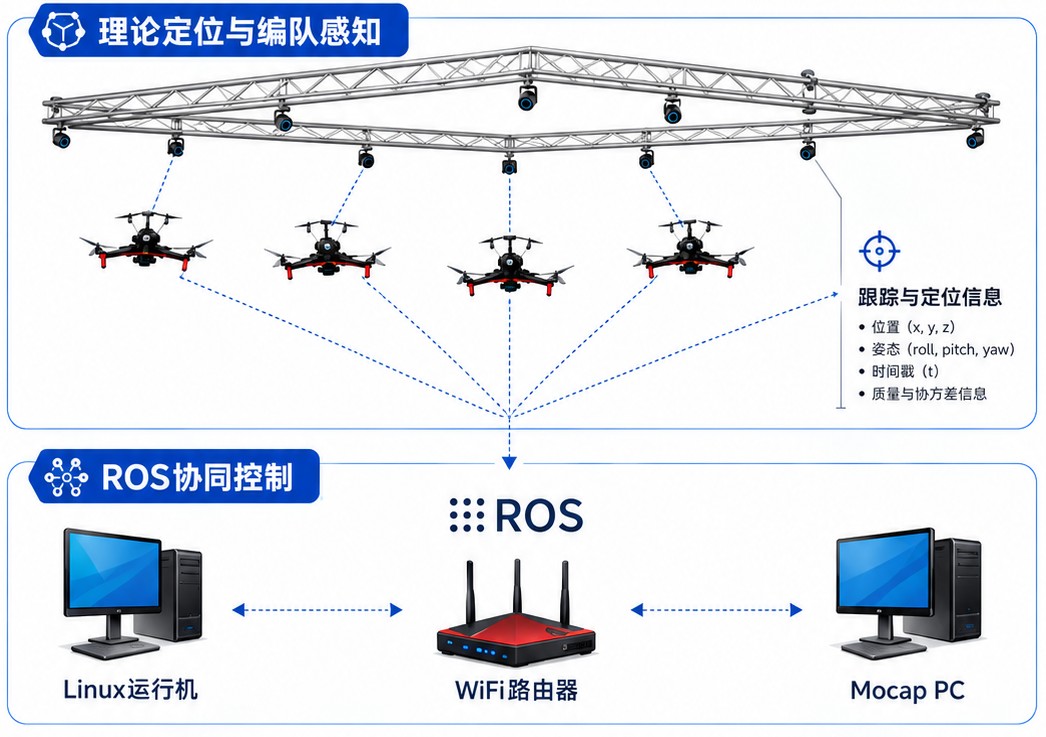
围绕多智能体系统、协同控制、安全控制、分布式定位与群体行为建模,构建自主无人系统协同运行的理论基础。

构建“感知—认知—决策—控制”闭环体系,支撑复杂环境下无人系统的自主运行、动态响应与协同优化。

依托室内无人系统实验平台,开展算法验证、协同控制、定位导航和安全避障等关键技术测试。

面向开放环境开展无人车、无人机协同实验,验证复杂场景下系统感知、通信、控制与任务协同能力。

构建无人系统数字孪生仿真环境,实现真实平台与虚拟场景联动,支撑算法迭代、任务推演与风险评估。

面向低空经济、智慧交通、应急救援、园区巡检等场景,开展自主无人系统协同应用与工程化验证。
