

研究方向:车路协同智能认知计算技术
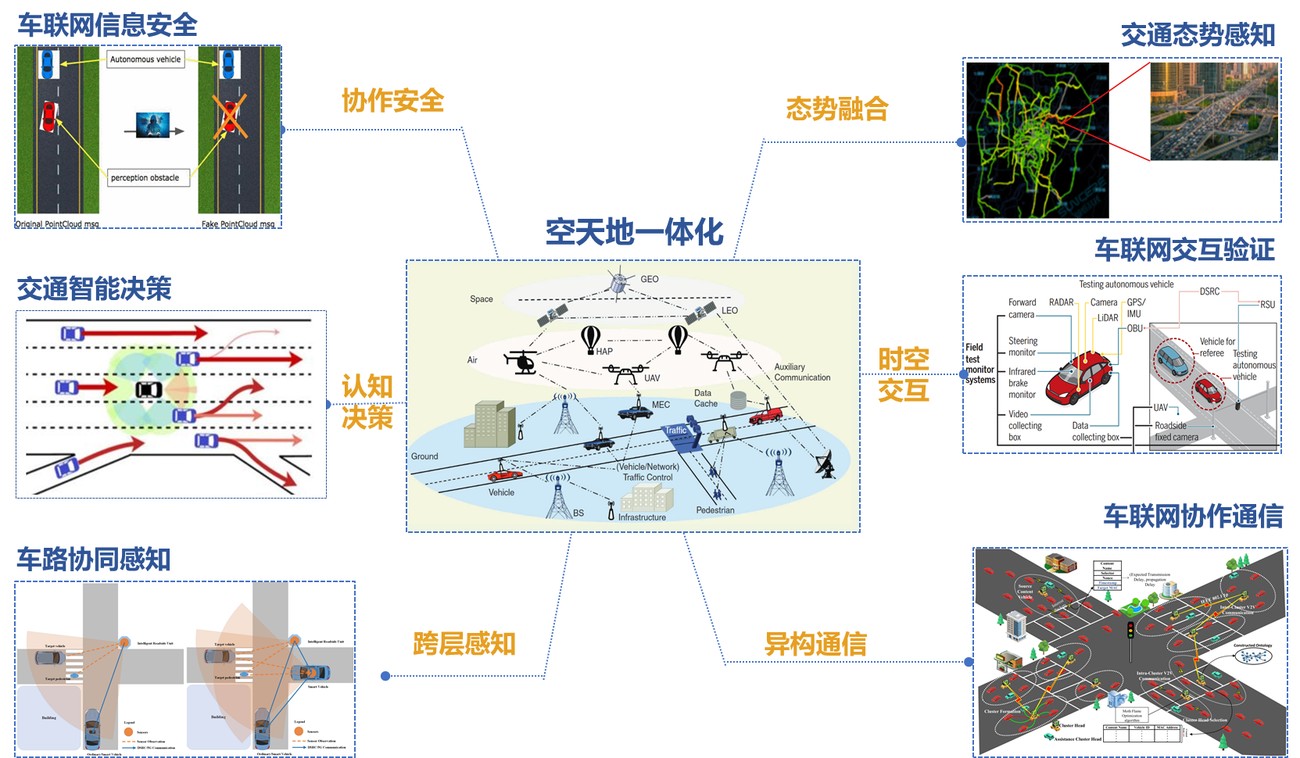
面向中越两国差异化的道路环境和交通需求,研发智能空地协同、车联网情境认知及智能决策关键技术,实现“车—路—无人机”空地协同、复杂态势精准预测与智能决策,开展共性技术差异化验证和示范性工程建设。


三条主线贯通“感知—传输—决策”全链路
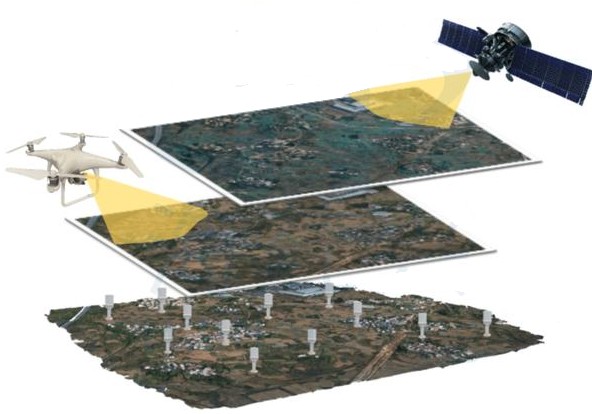
提出多数据层级融合与同步跨域耦合方法,实现车、路、无人机多节点宏观与微观协同感知,解决全时空协同感知问题。
提出深度学习驱动的网络资源优化和协同通信方法,结合软件定义网络与可编程虚拟化架构,解决全链路数据传输问题。
提出空地协同交互认知和多模态知识图谱推理方法,融合跨层联邦图学习与端边云计算,解决全要素辅助决策问题。
承担多项国家级、省部级重点研发任务
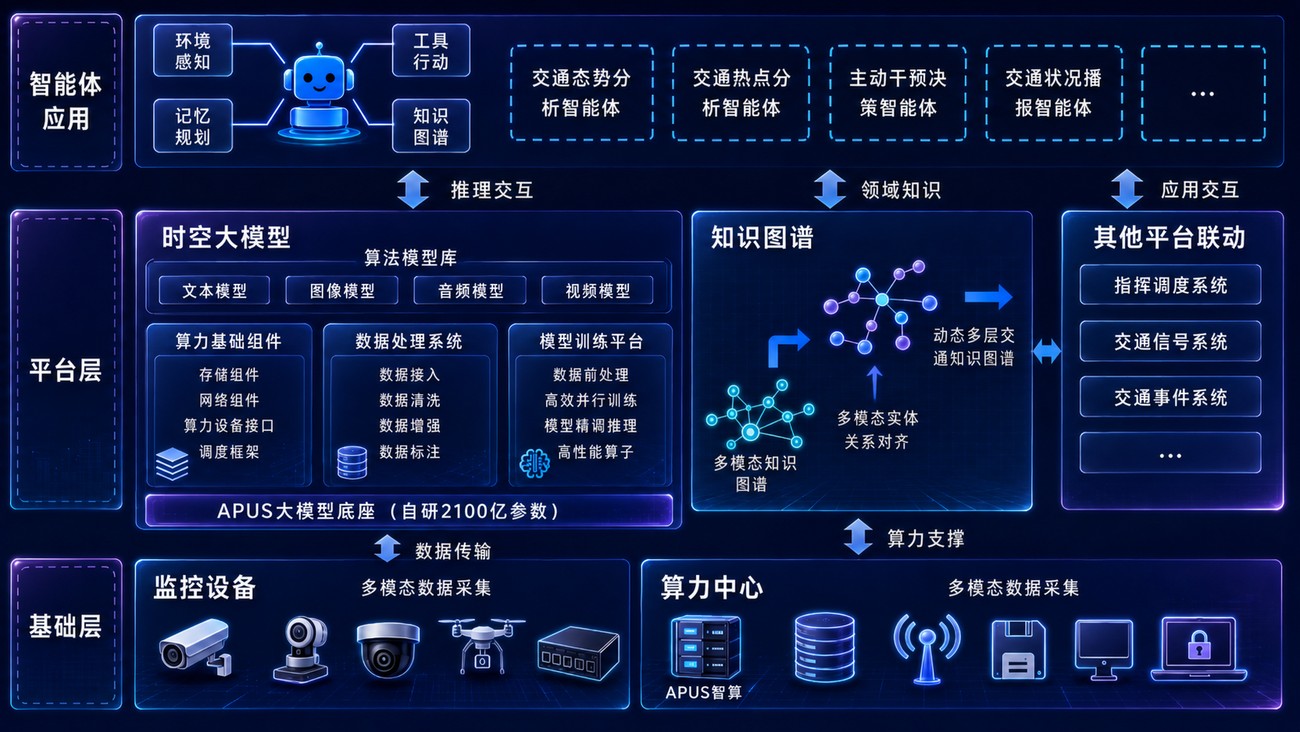
时空大模型驱动的城市交通智能决策引擎关键技术研究与示范
2025 年度河南省重点研发专项利用城市交通多源时空数据,构建时空大模型驱动的城市交通智能决策智能体。采集融合交通监测、道路影像、气象与事件信息等多模态数据,构建城市交通时空大模型,研制复杂多模式交通智能决策引擎,实现交通态势精准预测、风险事件动态推演、事故协同处置与交通自适应协同管控。
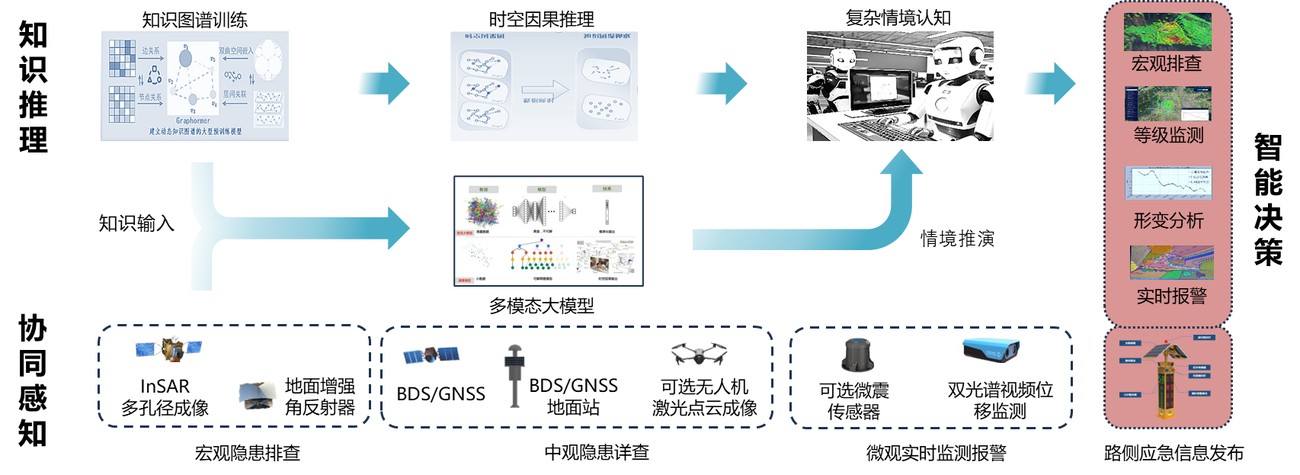
面向公路自然灾害风险的“天空地”协同监测预警与应急决策系统研究及示范应用
国家重点研发计划“政府间国际科技创新合作”专项开展多模态大模型驱动的公路自然灾害风险预警与决策引擎,建设“天空地”协同的智能监测、精准预警与应急决策系统,实现从“实时精准感知、风险早期识别”到“智能预警与应急决策支持”的闭环,提升主动防控能力。

新一代智能车联网技术研发
2026 年度河南省重点研发专项构建全方位多场景空地协同智能车联网验证体系,依托空地协同驱动的全系统实测平台,开展共性技术差异化验证和示范性工程建设。
联合中国联通、APUS、大数据研究院等单位协同攻关



